
Abstract
Modern cities have to respond to the growing demands of more efficient and sustainable urban development, as well as an increased quality of life. In this context, the cities of the future will need the ability to gain insight about current urban conditions and react dynamically to them. According to this view, "smart cities" can be seen as cybernetic urban environments in which different agents (e.g., citizens) and actuators (e.g., robots) exploit the city-wide infrastructure as a medium to operate synergistically. Urban Swarms explores the feasibility of swarm robotics systems in urban environments. By using bio-inspired methods, a swarm of robots is able to handle important urban systems and infrastructures, improving their efficiency and autonomy.
Related Publications
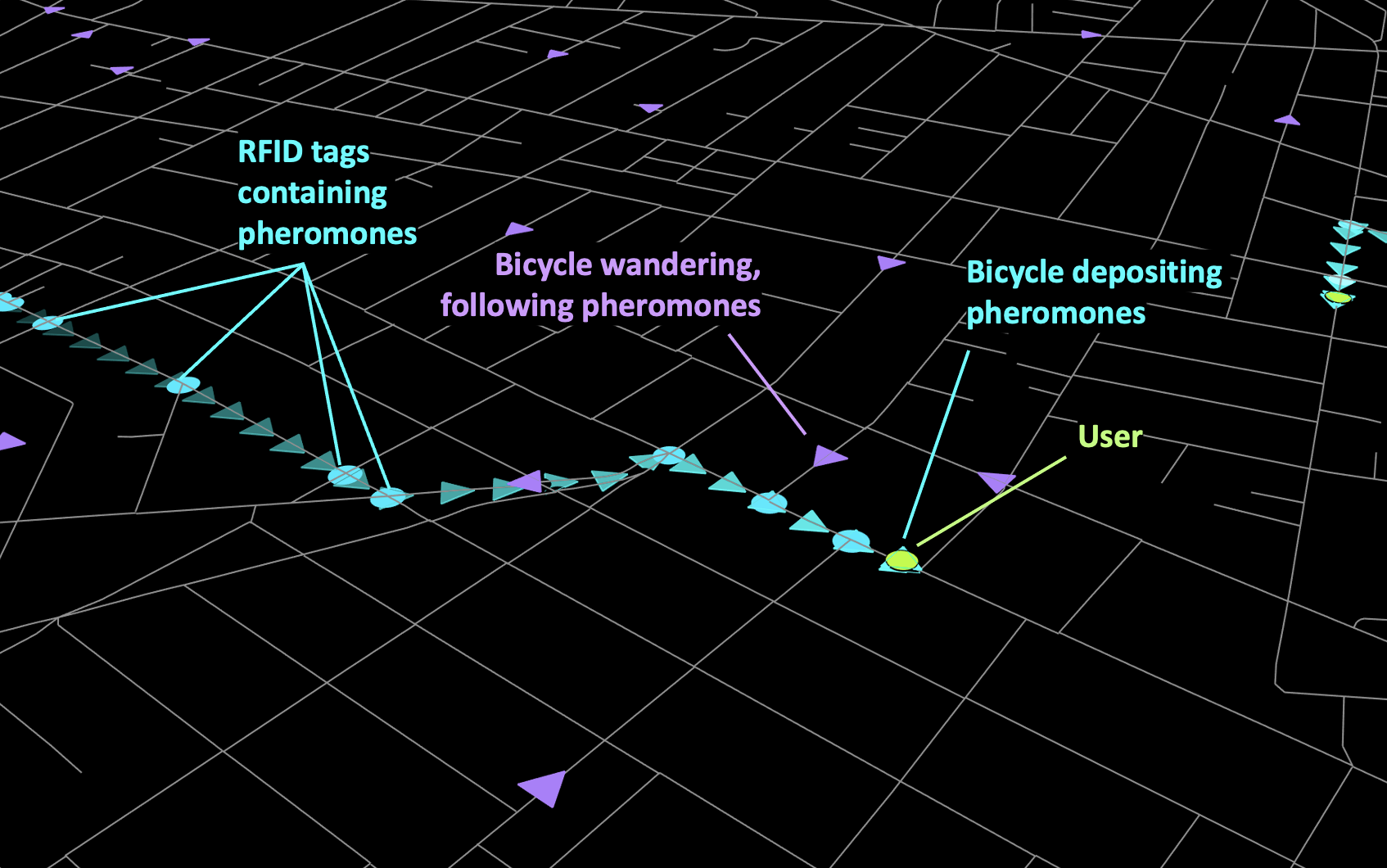
Urban Mobility Swarms: Towards a Decentralized Autonomous Bicycle-Sharing System
IEEE International Conference on Intelligent Transportation Systems (ITSC)
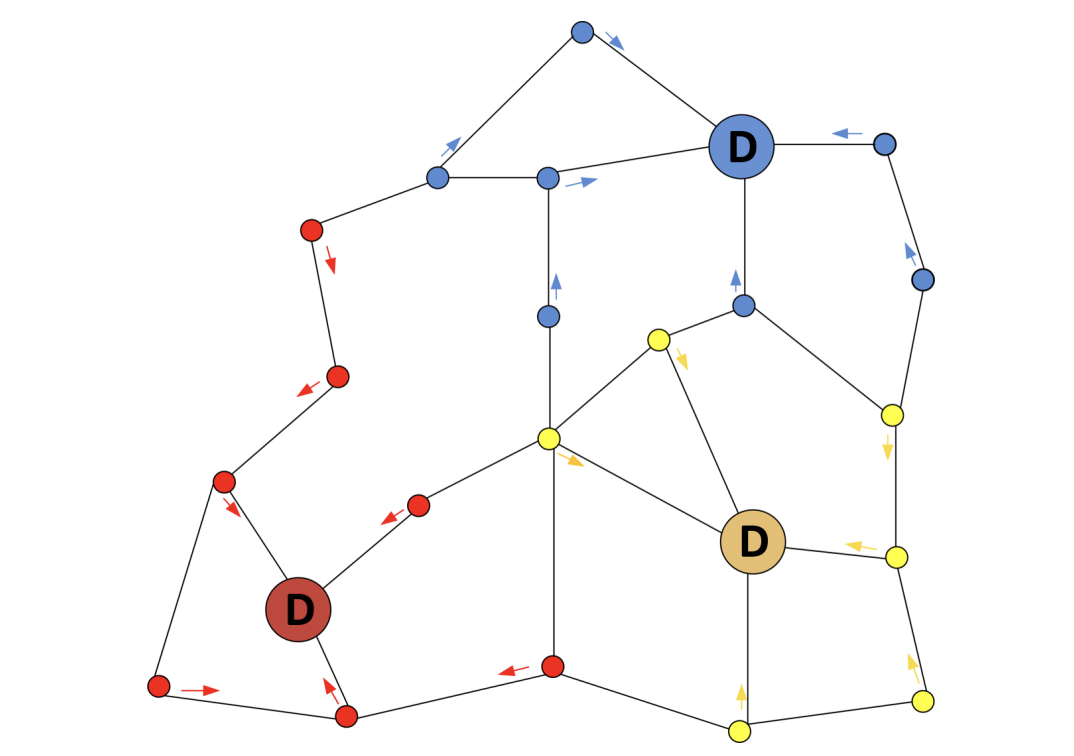
Urban Swarms: A new approach for autonomous waste management
IEEE International Conference on Robotics and Automation (ICRA)