Abstract
Swarms of robots will revolutionize many industrial applications, from targeted material delivery to precision farming. However, several of the heterogeneous characteristics that make them ideal for certain future applications (e.g, robot autonomy, decentralized control, collective emergent behavior) hinder the evolution of the technology from academic institutions to real-world problems. In the research line we aim to discover methods and tools to integrate robotic swarms into new scenarios.
Related Projects
Research Project
Jul 2021
Research Project
Jul 2021

Research Project
Nov 2015
Related Publications
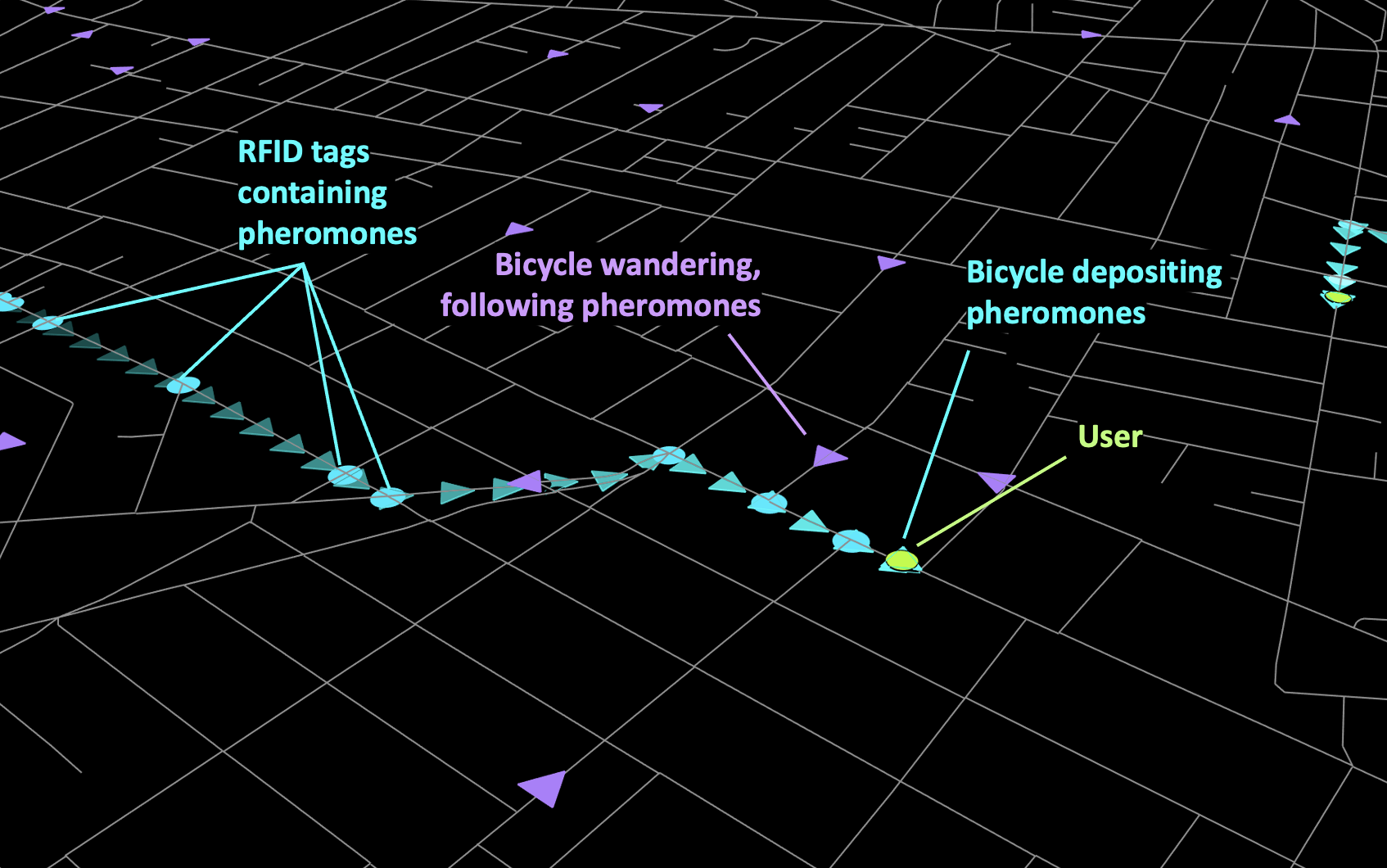
Urban Mobility Swarms: Towards a Decentralized Autonomous Bicycle-Sharing System
IEEE International Conference on Intelligent Transportation Systems (ITSC)
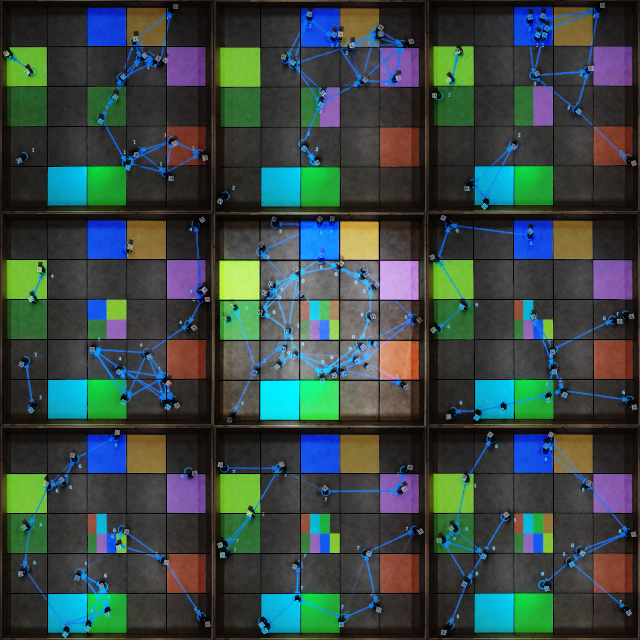
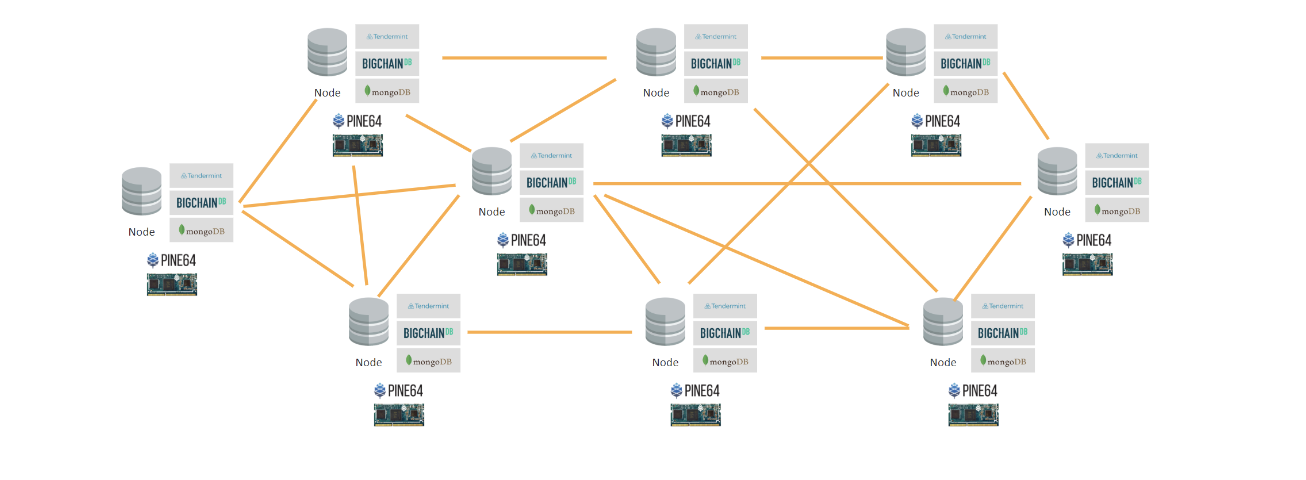
Blockchain technology secures robot swarms: A comparison of consensus protocols and their resilience to byzantine robots
Frontiers in Robotics and AI
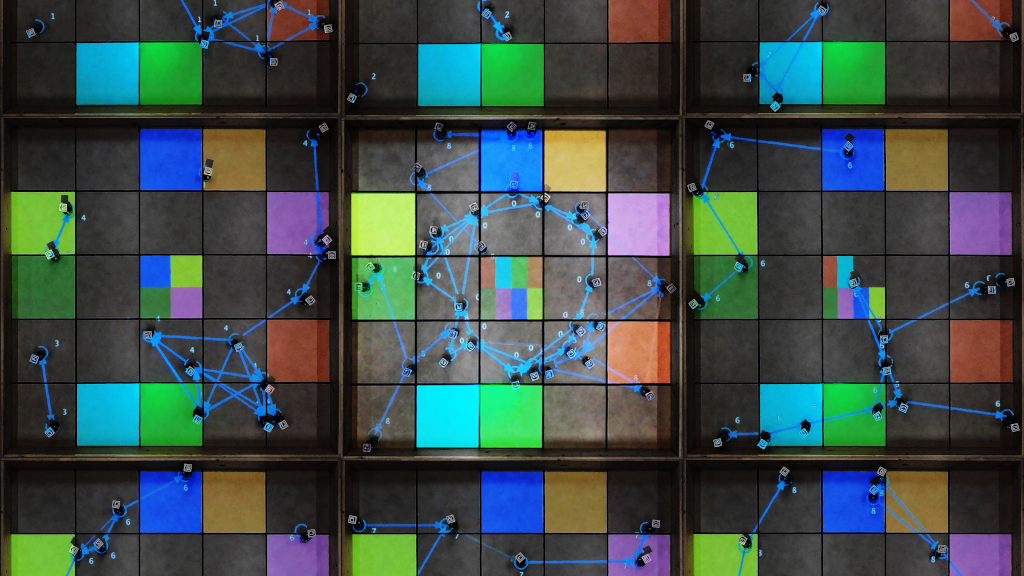
Urban Swarms: A new approach for autonomous waste management
IEEE International Conference on Robotics and Automation (ICRA)
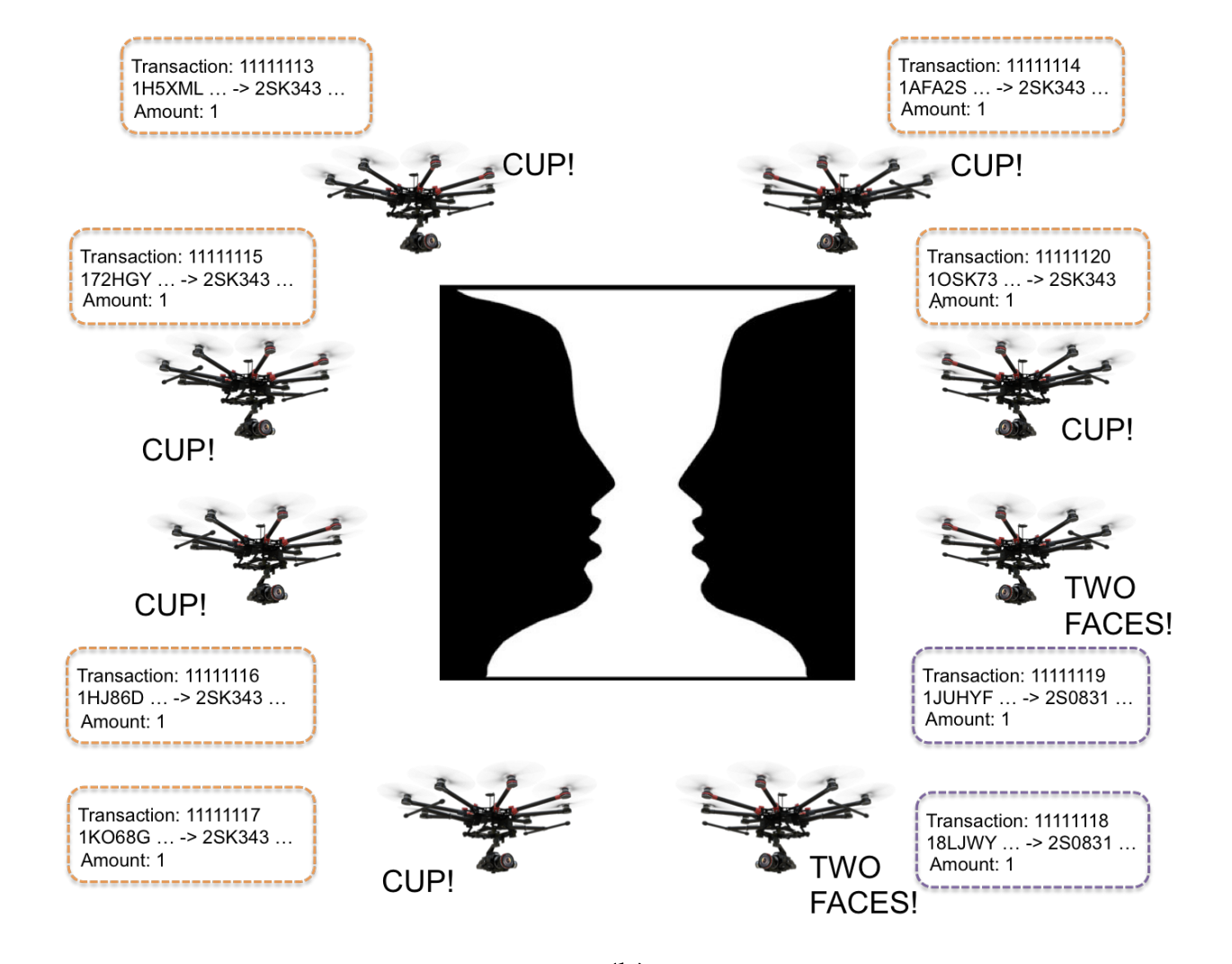
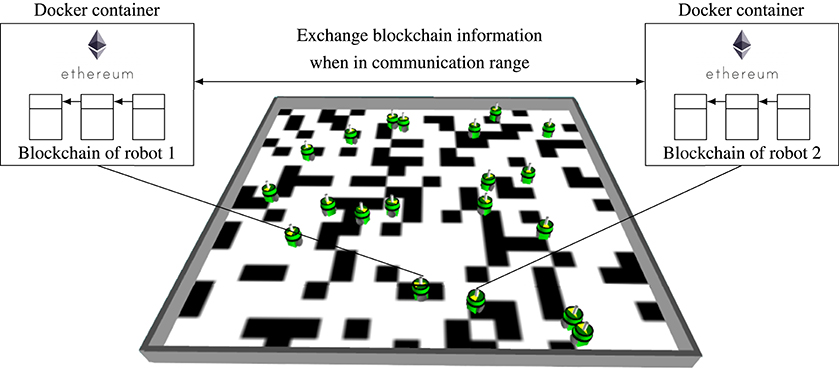
The blockchain: A new framework for robotic swarm system
Proceedings of the Future Technologies Conference (FTC)
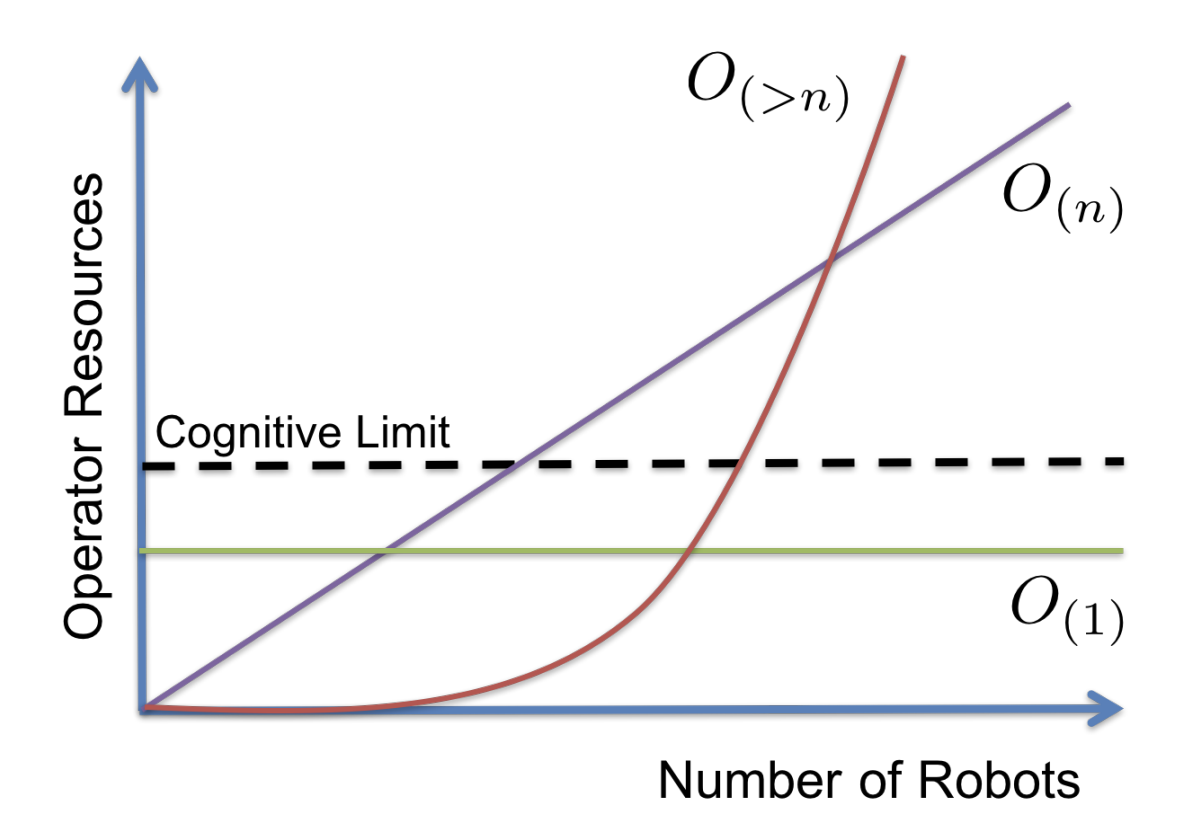
A wearable general-purpose solution for Human-Swarm Interaction
Proceedings of the Future Technologies Conference (FTC)
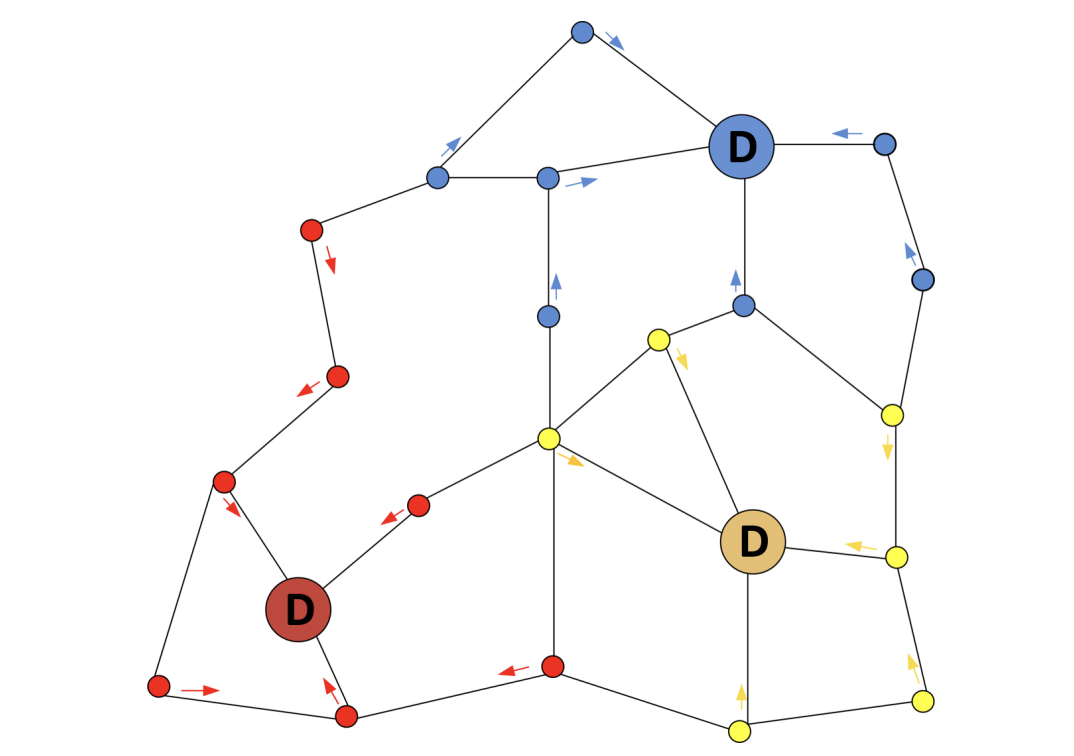
Managing byzantine robots via blockchain technology in a swarm robotics collective decision making scenario
Proceedings of the International Conference on Autonomous Agents and MultiAgent Systems
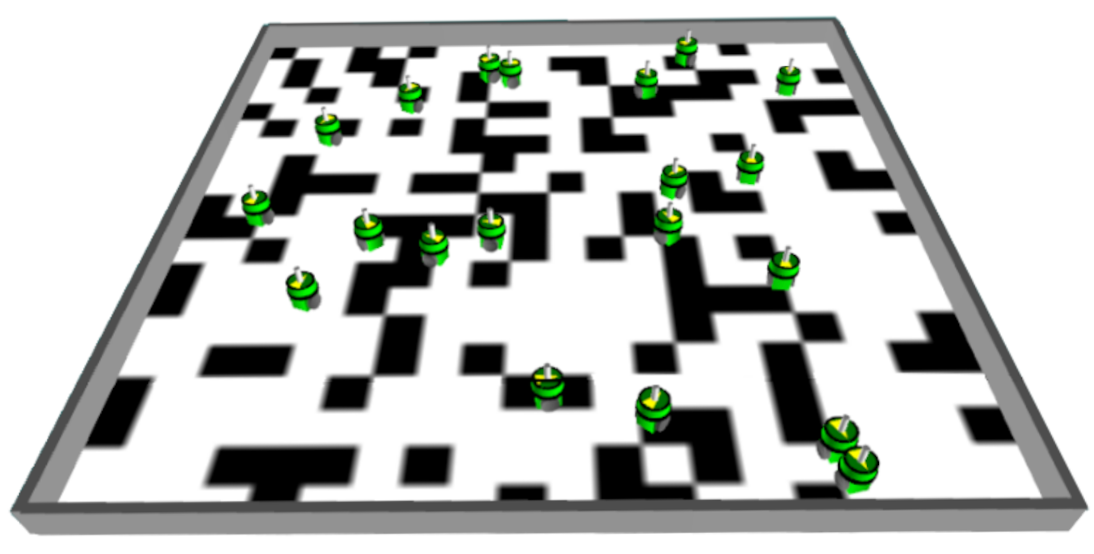
Adaptive foraging for simulated and real robotic swarms: the dynamical response threshold approach
Swarm Intelligence
Foraging optimization in swarm robotic systems based on an adaptive response threshold model
RSJ Advanced Robotics
Task Allocation for a robotic swarm based on an Adaptive Response Threshold Model
IEEE International Conference on Control, Automation and Systems (ICCAS)